|
iCub
|
Italian Institute of Technology
|
$250k |
Active
|
104cm |
22kg |
Battery backpack included on iCub 2.5/later full iCub versions; runtime not publicly disclosed |
Not disclosed |
|
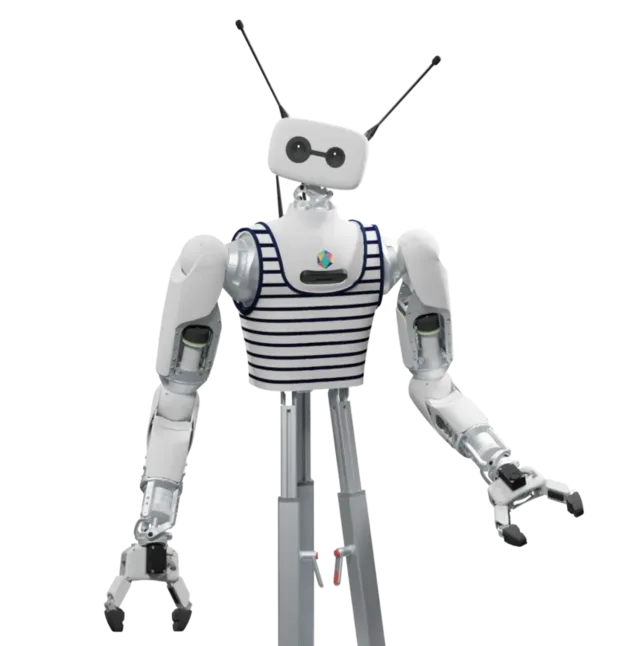
Reachy 2
|
Pollen Robotics
|
$70k |
Active
|
Adjustable (torso on mobile base tripod) |
50kg |
8 hours (mobile base, per official hardware docs) |
2.5 m/s (mobile base) |
|
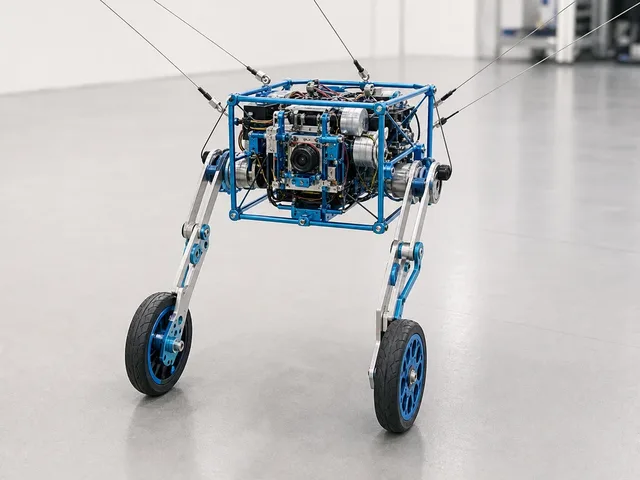
Roboto Origin
|
RoboParty
|
$35k |
Prototype
|
1.25 m |
34 kg |
Not officially specified (48 V, 15 Ah battery) |
3 m/s |
|
L1 Agile Mobile Manipulator
|
VLAI Robotics
|
$28.8k |
Active
|
Adjustable dual-arm working range reported as 70-160 cm; overall height not officially disclosed |
<100 kg whole-robot weight |
12 hours |
Not officially disclosed |
|
TRON 1
|
LimX Dynamics
|
$24.8k |
Available
|
≤845mm / 84.5cm |
≤20kg |
≤2h |
Point Foot: <1m/s; Sole: <1m/s; Wheeled: ≤3m/s |
|
NAO6
|
Aldebaran / Maxtronics
|
$17k |
Active
|
58cm |
5.6kg |
45 minutes to 2 hours |
Not disclosed |
|
Asimov DIY Kit (Here Be Dragons Edition)
|
Menlo Research
|
$15k |
Pre-order
|
1.20 m |
35 kg |
Not officially disclosed |
Not officially disclosed |
|
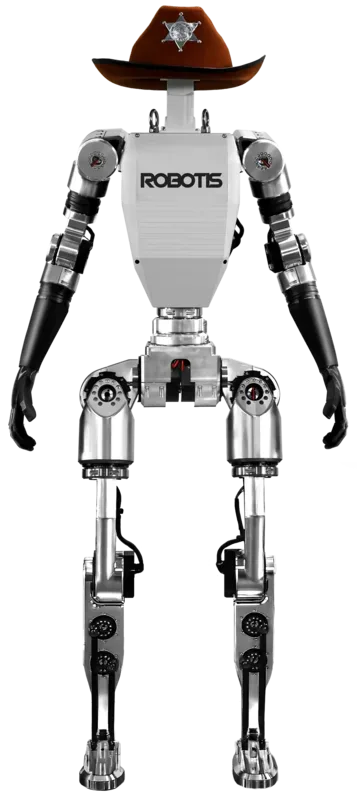
ROBOTIS OP3
|
ROBOTIS
|
$13.8k |
Available
|
About 510 mm |
About 3.5 kg (without skin cover) |
Hot-swappable LiPo packs; official specs list a 3-cell 11.1 V 3300 mAh battery and package contents include two battery packs (runtime not officially specified) |
Not disclosed |
|
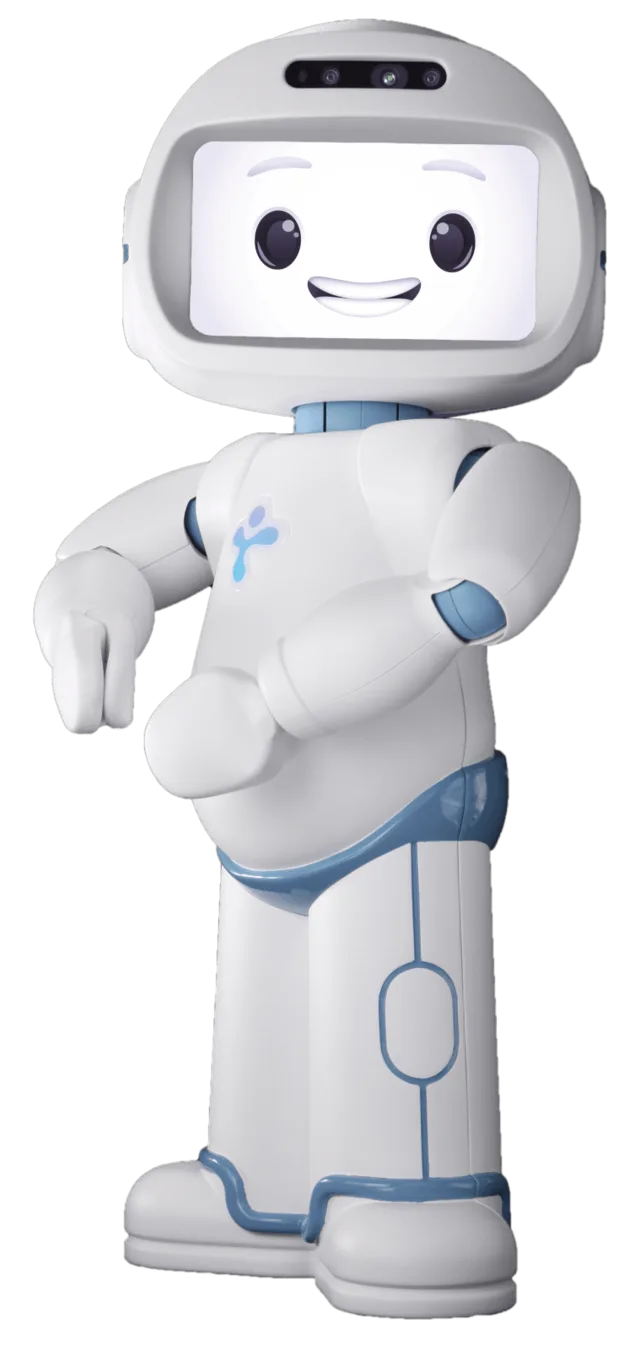
QTrobot
|
LuxAI
|
$10.9k |
Available
|
64 cm |
5 kg |
External power supply; optional battery/runtime not publicly disclosed |
N/A (tabletop robot) |
|
YOR
|
YOR Project
|
$9.2k |
Prototype
|
Adjustable lift/shoulder height reported around 0.6 m to 1.24 m; overall assembled height is not officially disclosed. |
27 kg |
Not officially disclosed |
Mechanically capable of up to 1.5 m/s translational velocity; software-limited to 0.25 m/s for safety during teleoperation and autonomous execution. |
|
LeRobot Humanoid
|
Hugging Face LeRobot
|
$2.6k |
Prototype
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
Vibe A1
|
Vibe Robotics
|
$1.5k |
Available
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
reBot Arm B601-DM
|
Seeed Studio
|
$1.2k |
Available
|
Desktop robotic arm; height not officially disclosed |
Approx. 4.5kg |
Not applicable; external 24V DC power |
Joint velocity up to 200 rad/s on J4/J5/J6/gripper and 50 rad/s on J1/J2/J3 (CNX Software) |
|
SamuRoid
|
XiaoR GEEK
|
$1.1k |
Available
|
389.81 mm |
2.3 kg |
Approx. 1 hour (12 V, 3000 mAh battery) |
Not disclosed |
|
Blueprint Robotics
|
Sphero
|
$649 |
Pre-order
|
Not officially disclosed |
Not officially disclosed |
Uses a rechargeable robot battery; runtime not officially disclosed |
Not officially disclosed |
|
UGV Beast
|
Waveshare
|
$265 |
Available
|
122 mm without pan-tilt; 252 mm with PT camera |
2.034 kg without pan-tilt; 2.35 kg with PT camera |
Not officially disclosed; uses 3x 18650 lithium cells with a 3S UPS module, batteries not included |
0.35 m/s default max speed |
|
SpikerBot
|
Backyard Brains
|
$219 |
Pre-order
|
Not officially disclosed |
Not officially disclosed |
Uses swappable AA batteries; runtime not officially disclosed |
Not officially disclosed |
|
micro:bit PU Robot Kit
|
ELECFREAKS
|
$190 |
Available
|
16 cm |
300 g robot body; 720 g complete kit |
Approx. 20 minutes depending on usage mode |
Not officially disclosed |
|
HRP-4C
|
AIST
|
— |
Discontinued
|
158cm |
43kg (including battery) |
~20 minutes |
Not disclosed |
|
HRP-5P
|
AIST
|
— |
Prototype
|
182cm |
101kg |
Not disclosed |
Not disclosed |
|
Husky A300
|
Clearpath Robotics
|
— |
Available
|
372 mm chassis height |
78.5 kg to 105 kg depending on 40 Ah, 80 Ah, or 120 Ah battery configuration |
Average 8 h, 16 h, or 24 h depending on 40 Ah, 80 Ah, or 120 Ah battery configuration under Clearpath's stated duty cycle |
2.0 m/s |
|
Argus
|
Duke University
|
— |
Prototype
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
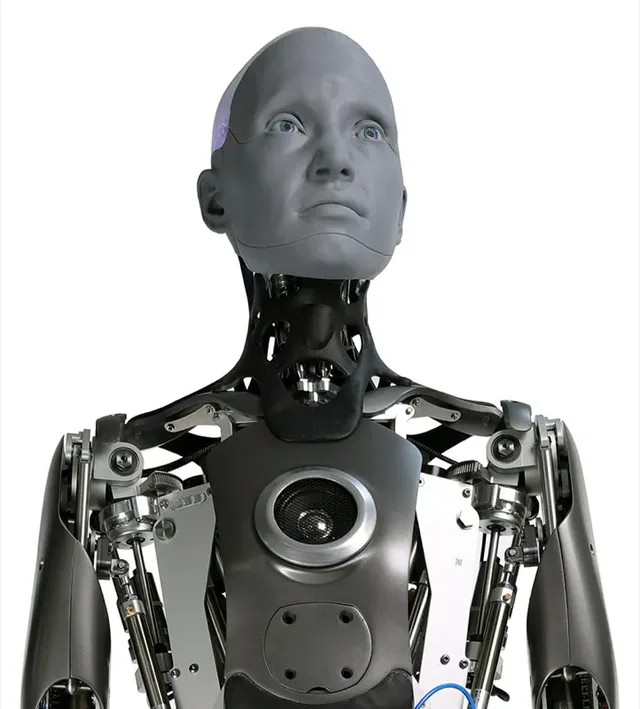
Ameca
|
Engineered Arts
|
— |
Active
|
187 cm (73.6 in) |
62 kg (137.7 lb) |
Not disclosed |
Stationary (upper body only) |
|
Sophia
|
Hanson Robotics
|
— |
Active
|
167cm |
48kg (with base) |
~1.5 hours |
Not disclosed; current official robots listing says Walking Capability but publishes no speed |
|
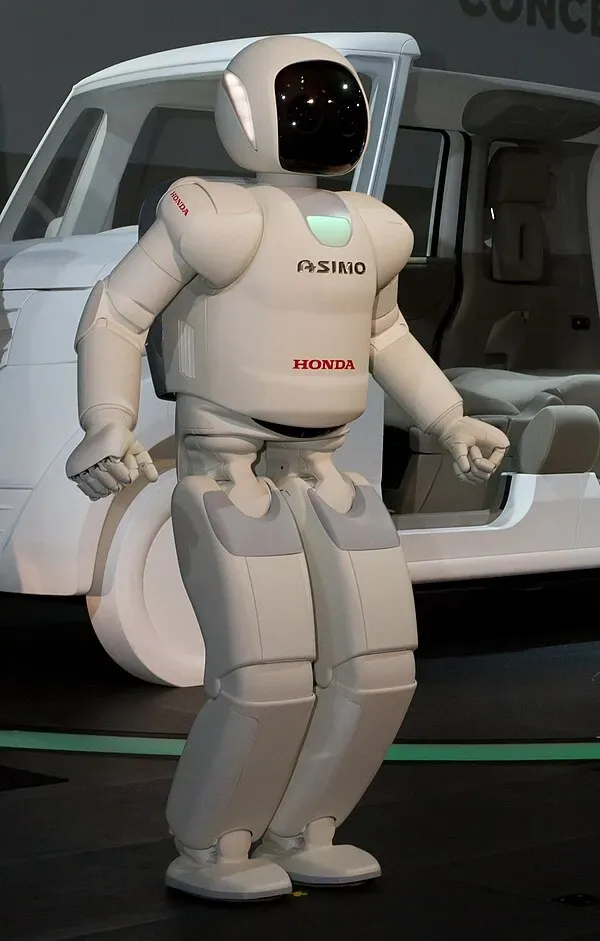
ASIMO
|
Honda
|
— |
Discontinued
|
130cm |
48kg |
40 minutes walking; continuous operation possible using automatic recharging |
9 km/h (running), 2.7 km/h (walking) |
|
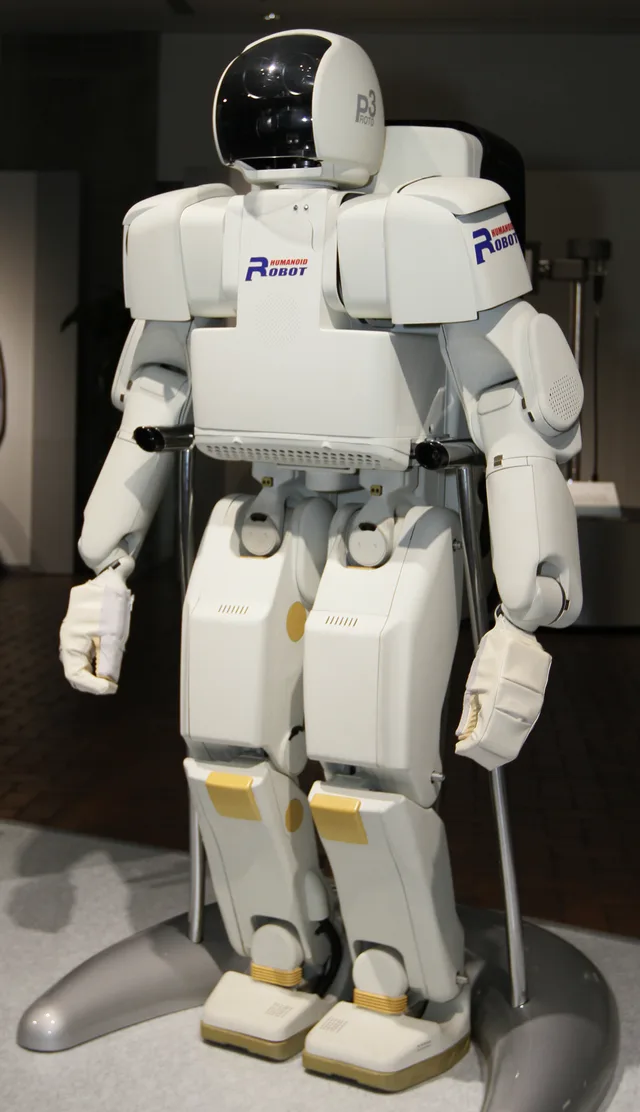
P3
|
Honda
|
— |
Discontinued
|
160cm |
130kg |
25 minutes |
2 km/h |
|
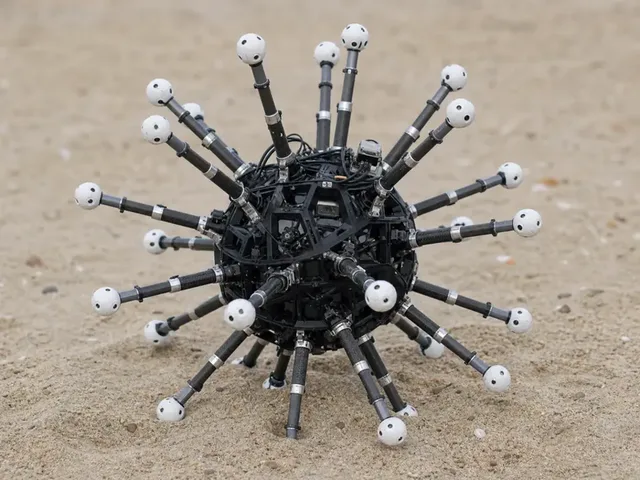
WiXus
|
JSK Robotics Laboratory, The University of Tokyo
|
— |
Prototype
|
Not officially disclosed; main body is a 180 mm cube |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
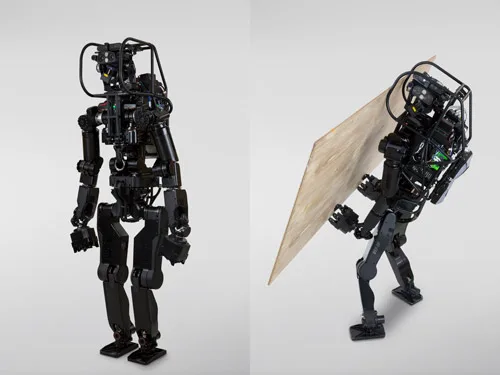
DRC-HUBO+
|
KAIST
|
— |
Prototype
|
175cm |
80kg |
~60 min (task-dependent) |
~3 km/h (wheeled mode), ~1.5 km/h (walking) |
|
Kynooe One
|
Kynooe
|
— |
Pre-order
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
TRON 2
|
LimX Dynamics
|
— |
Active
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Sole: 2-3m/s; Wheeled: 3-5m/s |
|
HELIOS
|
ORBIT Robotics
|
— |
Prototype
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
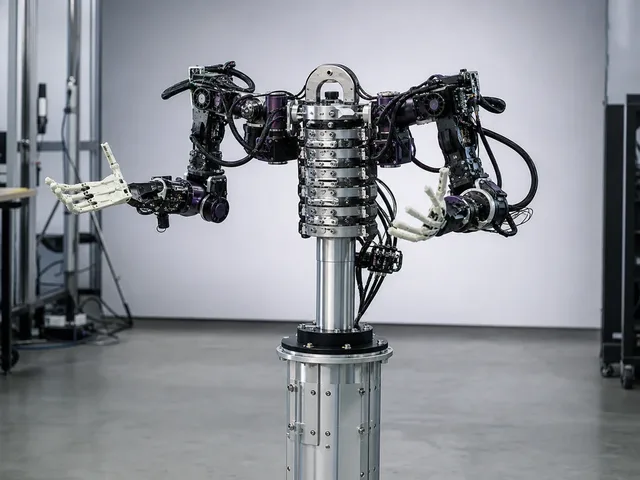
Robonaut 2
|
NASA / General Motors
|
— |
Discontinued
|
100cm (torso only) |
150kg (with climbing legs) |
Powered by ISS (no internal battery) |
N/A (stationary/mounted) |
|
Valkyrie (R5)
|
NASA JSC
|
— |
Active
|
188cm |
136kg |
~1 hour |
Not disclosed |
|
TALOS
|
PAL Robotics
|
— |
Active
|
175cm |
95kg |
1.5h walking / 3h standby |
3 km/h maximum walking speed |
|
TIAGo
|
PAL Robotics
|
— |
Active
|
110–145cm (telescoping torso) |
60 kg in the current documented hardware overview; modular arm/end-effector configurations may vary |
4–5h (1 battery) / 8–10h (2 batteries) |
3.6 km/h |
|
REEM-C
|
PAL Robotics
|
— |
Active
|
165cm |
80kg |
3h walking / 6h standby |
2.5 km/h |
|
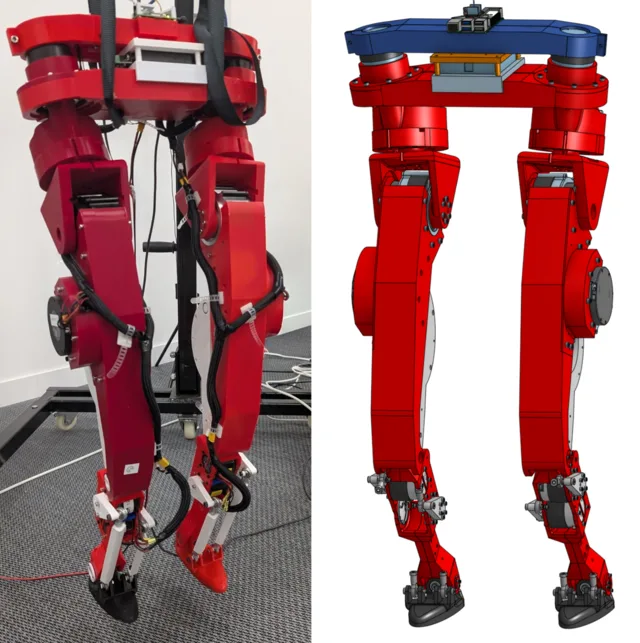
KANGAROO
|
PAL Robotics
|
— |
Active
|
1.58 m |
50–65 kg depending on platform configuration |
3h autonomy |
Not disclosed; official locomotion modes include walking, running, jumping, and stair climbing |
|
TIAGo Pro
|
PAL Robotics
|
— |
Active
|
Not officially disclosed; includes a 35cm lifting torso |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
Roadrunner
|
Robotics & AI Institute
|
— |
Prototype
|
Not officially disclosed |
Around 15 kg (33 lb) |
Not officially disclosed |
Not officially disclosed |
|
AthenaZero
|
Robotics & AI Institute
|
— |
Prototype
|
Approximately 1.6 m (5 ft 3 in) |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
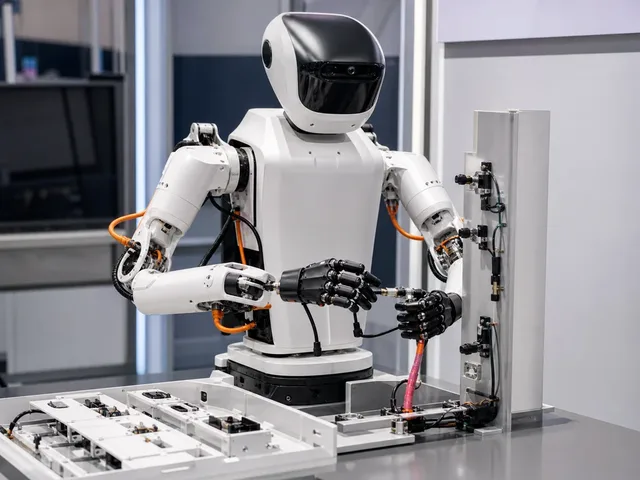
AI Sapiens K0
|
ROBOTIS
|
— |
Development
|
1300 mm (1.3 m) |
34 kg |
Not officially disclosed (46.8 V, 9000 mAh battery) |
Not disclosed |
|
QRIO
|
Sony
|
— |
Discontinued
|
58cm |
Approximately 7 kg (with battery and memory) |
~1 hour |
23 cm/s (running) |
|
Ace
|
Sony AI
|
— |
Prototype
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Ball returns up to 19.6 m/s; mobile locomotion not applicable |
|
Sudo R1
|
Sudo AI
|
— |
Prototype
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
A1
|
TARS Robotics
|
— |
Prototype
|
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
Not officially disclosed |
|
Athena
|
Technical University of Darmstadt SIM Group
|
— |
Prototype
|
Not officially disclosed |
50kg |
Not officially disclosed |
1.5 m/s |
|
H2 Plus
|
Unitree Robotics
|
— |
Development
|
182cm |
About 70kg with battery |
About 3 hours |
Not officially disclosed |
|
SURENA IV
|
University of Tehran (CAST)
|
— |
Active
|
170cm |
68kg |
Not disclosed |
0.7 km/h |