The KANGAROO is a
Research robot made by
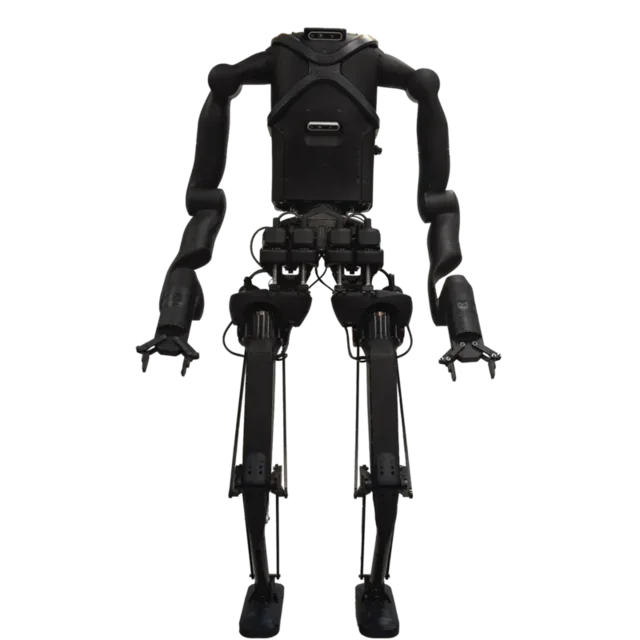
PAL Robotics. KANGAROO is PAL Robotics' development-ready biped humanoid platform for dynamic locomotion, reinforcement learning, embodied AI, and robotic movement research. The official product page lists a 1.58 m, configuration-dependent 50–65 kg platform with 14–40 total degrees of freedom, optional 4-, 5-, or 7-DoF arms, two 6-DoF legs, a 2-DoF torso, parallel grippers or dexterous hands, and arm payloads that vary by arm configuration. PAL positions the platform around robust walking, running, jumping, stair-climbing, ROS 2 control, a full reinforcement-learning pipeline, and mjlab open-source physics simulation rather than consumer home service. PAL's August 2024 announcement said Kangaroo had moved from prototype to a ready-to-use purchasable product and that the first unit had been delivered to TU Wien, while current public pricing, shipping regions, and finalized customer configurations remain quote-only. It features 5 sensor types, 3 connectivity protocols, and 11 distinct capabilities.