Commercial model
Pricing not public
No public list price (contact sales). That usually means the final commercial package depends on deployment scope, services, or negotiated terms.
Height
165 cm
Weight
80 kg
Battery
3h walking / 6h standby
Speed
2.5 km/h
Payload
1 kg
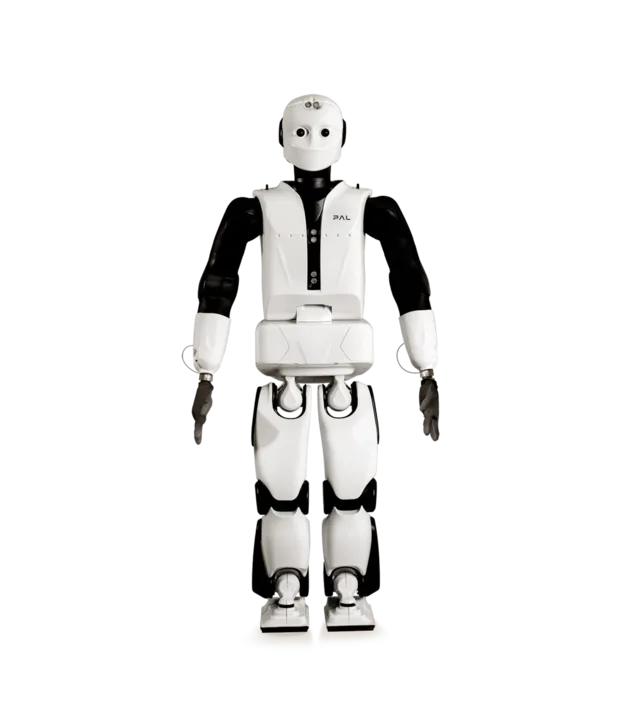
REEM-C is a full-size bipedal humanoid research robot built by PAL Robotics in Barcelona, Spain. Standing 165 cm tall with 68 degrees of freedom, it can walk stably, climb stairs, and sit in a chair. It runs on ROS with Ubuntu Linux and is fully open-source in simulation. Designed for AI and robotics research, it supports whole-body control, autonomous navigation, grasping, speech recognition, and teleoperation. Used by universities and research labs worldwide.
Listed price
Price TBA
No public list price (contact sales)
Release window
Jan 1, 2013
Current status
Active
PAL Robotics
Last verified
May 25, 2026
Share this robot
Open a plain share composer on X or Bluesky for this robot profile.
Technical overview
A fast read on the mechanical profile, sensing package, and platform integrations behind REEM-C.
Height
165 cm
Weight
80 kg
Dimensions
165cm (H) x 60cm (W)
Battery Life
3h walking / 6h standby
Charging Time
Not disclosed
Max Speed
2.5 km/h
Payload
1 kg
Operational profile
Capabilities
11
Connectivity
2
Key capabilities
Ecosystem fit
Explore further
Benchmark set
Shortcuts to the closest alternatives in the current ui44 set.

Research
TIAGo
PAL Robotics
Price TBA

Research
TIAGo Pro
PAL Robotics
Price TBA
Research
TALOS
PAL Robotics
Price TBA
Research
KANGAROO
PAL Robotics
Price TBA
Coverage
Reporting and explainers linked to REEM-C.
The REEM-C is a Research robot built by PAL Robotics. REEM-C is a full-size bipedal humanoid research robot built by PAL Robotics in Barcelona, Spain. Standing 165 cm tall with 68 degrees of freedom, it can walk stably, climb stairs, and sit in a chair. It runs on ROS with Ubuntu Linux and is fully open-source in simulation. Designed for AI and robotics research, it supports whole-body control, autonomous navigation, grasping, speech recognition, and teleoperation. Used by universities and research labs worldwide.
Pricing has not been publicly disclosed. See all PAL Robotics robots on the PAL Robotics page.
Detailed specifications for the REEM-C
Height
165cmAt 165cm, the REEM-C is sized for its intended operating environment and use cases.
Weight
80kgWeighing 80kg, the REEM-C balances structural integrity with portability and maneuverability.
Dimensions
165cm (H) x 60cm (W)The overall dimensions of 165cm (H) x 60cm (W) define the robot's physical footprint and determine what spaces it can navigate and what clearances it requires for operation.
Battery Life
3h walking / 6h standbyWith a battery life of 3h walking / 6h standby, the REEM-C can operate for sustained periods before requiring a recharge. Battery life is measured under typical operating conditions and may vary based on workload intensity and environmental factors.
Maximum Speed
2.5 km/hA top speed of 2.5 km/h is calibrated for the robot's primary operating environment and safety requirements.
Payload Capacity
1 kg hand payload (arm stretched)A payload capacity of 1 kg hand payload (arm stretched) determines what the robot can carry or manipulate. This is a critical spec for practical applications where the robot needs to handle physical objects.
AI Platform
ROS-based; real-time ros_control loop at 200 Hz; MoveIt! for motion planning; Whole-Body ControlThe REEM-C uses ROS-based; real-time ros_control loop at 200 Hz; MoveIt! for motion planning; Whole-Body Control as its intelligence backbone. This AI platform powers the robot's decision-making, perception processing, and autonomous behavior. The sophistication of the AI stack directly impacts how well the robot handles unexpected situations and adapts to new environments.
The REEM-C integrates 6 sensor types, forming the perceptual foundation that enables autonomous operation.
This sensor configuration enables the REEM-C to perceive its environment and operate autonomously in its intended use cases. Multiple sensor modalities provide redundancy and more robust perception than any single sensor type alone.
Explore sensor technologies: components glossary · full components directory
Research robots serve as platforms for advancing robotics science and engineering. They enable researchers to test theories about locomotion, manipulation, perception, and human-robot interaction in controlled and real-world environments.
The REEM-C offers 11 distinct capabilities, each contributing to the robot's practical utility.
These capabilities work together with the robot's 6 onboard sensor types and ROS-based; real-time ros_control loop at 200 Hz; MoveIt! for motion planning; Whole-Body Control AI platform to deliver practical, real-world performance.
The REEM-C integrates with the following platforms and ecosystems, extending its utility beyond standalone operation.
This ecosystem compatibility enables the REEM-C to work as part of a broader automation setup rather than operating in isolation.
11
Capabilities
6
Sensor Types
AI
ROS-based; real-time…
Autonomous navigation allows the REEM-C to move through its environment without human guidance, planning efficient paths around obstacles and adapting to changes in real time. For a research robot, this involves simultaneous localization and mapping (SLAM) to build and maintain environmental models, path planning algorithms to find efficient routes, and reactive obstacle avoidance for unexpected situations. The complexity of autonomous navigation scales dramatically with the environment — navigating a structured warehouse is substantially different from navigating a cluttered home or outdoor space. The REEM-C's navigation system must handle the specific challenges of its intended deployment scenarios reliably and repeatedly.
How the REEM-C communicates with your network, smart home devices, cloud services, and companion apps.
The REEM-C by PAL Robotics integrates 9 distinct technology components across sensing, connectivity, intelligence, and interaction layers. The physical platform features a height of 165cm, a weight of 80kg, a top speed of 2.5 km/h, providing the foundation on which this technology stack operates.
The perception layer is built on Stereo Camera, Back Camera, 6-Axis Force/Torque Sensors (ankles and wrists), 4x Linear Array Microphones, 4x Sonar Sensors (torso, head), IMU. These work in concert to give the robot a detailed understanding of its operating environment. This multi-sensor approach provides redundancy and enables the robot to function reliably even when individual sensors encounter challenging conditions such as low light, reflective surfaces, or cluttered spaces.
ROS-based; real-time ros_control loop at 200 Hz; MoveIt! for motion planning; Whole-Body Control serves as the computational brain, processing sensor data, making navigation decisions, and orchestrating the robot's autonomous behaviors. The quality of this AI platform directly influences how well the robot handles novel situations, adapts to changes in its environment, and improves its performance over time through learning.
Research robots are acquired by universities, government labs, and corporate R&D departments. They serve as experimental platforms for developing new algorithms, testing locomotion strategies, and advancing the field of robotics. Some are also used for educational purposes.
Open-source software compatibility (ROS/ROS 2), sensor modularity, programmability, available SDK/API quality, community support, and published research papers using the platform are key factors. Documentation quality and the ability to modify both hardware and software are essential for research use.
Pricing
The REEM-C is in active commercial production and currently sold by PAL Robotics. Check the manufacturer's website or authorized retailers for the latest stock and ordering information.
Engineering compromises and where this research robot excels
With 6 sensor types onboard, the REEM-C has one of the more comprehensive perception systems in the research category. This multi-modal approach enables robust environmental awareness, redundant obstacle detection, and reliable autonomous operation even in challenging conditions. More sensor diversity generally translates to better real-world adaptability.
With 11 distinct capabilities, the REEM-C is designed as a versatile platform rather than a single-task device. This breadth means the robot can handle varied scenarios and workflows, reducing the need for multiple specialized robots and increasing its utility across different situations.
A battery life of 3h walking / 6h standby provides substantial operational runway. For research applications, this means longer work sessions between charges, fewer interruptions, and the ability to complete larger tasks or cover more area in a single charge cycle.
At 80kg, the REEM-C is a substantial piece of equipment. This weight contributes to stability and robustness but also means the robot requires careful consideration of floor load limits, transportation logistics, and the potential impact force in the event of unexpected contact with people or objects.
PAL Robotics has not published a public price for the REEM-C. While common for enterprise-class robotics, the absence of transparent pricing can complicate budgeting and comparison shopping. Prospective buyers will need to engage directly with the manufacturer for quotes, which may vary by configuration and volume.
Note: This strengths and trade-offs assessment is based on the REEM-C's documented specifications as tracked in the ui44 database. Real-world performance depends on deployment conditions, firmware maturity, and environmental factors. For the most current information, check the PAL Robotics manufacturer page or visit the official product page. Use the comparison tool to evaluate these trade-offs against competing robots in the same category.
Understanding the engineering behind this category
Research robots serve a fundamentally different purpose than commercial or consumer models. They are platforms for discovery — enabling scientists and engineers to test theories, develop algorithms, and push the boundaries of what robots can do. The technology in research robots prioritizes openness, flexibility, and access to raw data over consumer-friendly packaging or commercial reliability. Understanding this distinction is important for anyone considering a research robot platform.
Research robots typically expose their navigation systems at a much lower level than commercial products. Researchers can access raw sensor data, modify SLAM algorithms, implement custom path planners, and test novel navigation approaches. ROS (Robot Operating System) and ROS 2 compatibility is standard, providing a common framework for sharing navigation modules across the research community. This openness enables rapid iteration — a researcher can swap between different SLAM implementations, test new obstacle avoidance strategies, or develop entirely novel navigation paradigms without being locked into a vendor's proprietary stack.
Research robots serve as physical testbeds for AI algorithms that may eventually appear in commercial products years later. Reinforcement learning, imitation learning, few-shot task learning, and human-robot interaction studies all require robot platforms that can execute AI-generated commands in the physical world. The gap between simulation (where training is cheap and fast) and reality (where physics is unforgiving) makes physical robot platforms essential for validating AI approaches. Research robots must support rapid deployment of new AI models without extensive integration work.
Research platforms prioritize sensor modularity and data access. Standard mounting interfaces allow researchers to attach custom sensors alongside built-in ones. Raw sensor data streams (not just processed results) are accessible for developing novel perception algorithms. Precise time-stamping and synchronization across sensor streams enable accurate multi-modal fusion research. Many research robots include more sensors than strictly necessary for any single application, providing researchers with rich datasets for developing and testing new algorithms.
Research robots balance operational runtime with practical lab use. Sessions of one to four hours are typical, with quick charging between experiments. Some research setups use tethered power for long-running experiments where battery limitations would interrupt data collection. Power monitoring and logging capabilities help researchers understand the energy costs of different behaviors and algorithms — important for developing efficient approaches that will eventually run on battery-constrained commercial systems.
Research environments present unique safety challenges because robots are constantly being programmed with untested behaviors. Hardware safety limits (joint speed caps, force limits, emergency stops) must be robust regardless of software commands. Safety-rated monitored stop and speed monitoring ensure the robot cannot exceed safe operating parameters even when running experimental code. Collaborative operation standards apply when researchers work alongside the robot during experiments. Many labs implement layered safety with physical barriers for high-speed testing and open-area operation restricted to validated, lower-risk behaviors.
Research robot platforms are becoming more accessible and capable. Cloud robotics enables remote experiment execution and shared datasets. Digital twins and high-fidelity simulators reduce the need for physical hardware time while improving sim-to-real transfer. Standardized benchmarks and open datasets enable fair comparison of results across labs. The democratization of robotics research — through lower-cost platforms, open-source software, and cloud infrastructure — is expanding who can contribute to advancing the field.
The REEM-C by PAL Robotics incorporates many of these technology pillars. For a detailed look at the specific sensors and components used in the REEM-C, see the sensor analysis and connectivity sections above, or browse the complete components glossary for explanations of every technology used across the robotics industry.
How this robot compares in the research landscape
PAL Robotics has not publicly disclosed pricing for the REEM-C, which is typical for enterprise-focused robotics platforms that offer customized solutions and direct-sales relationships.
With 6 sensor types, the REEM-C has an extensive sensor suite. This comprehensive sensing capability places it among the more perception-capable robots in the research category, enabling more robust autonomous operation in varied conditions.
Being currently available for purchase gives the REEM-C a practical advantage over competitors still in development or prototype stages. Buyers can evaluate the actual product rather than relying on spec-sheet promises that may change before release.
Side-by-side specs, capability overlap analysis, and key differentiators.
For the full picture of PAL Robotics's portfolio and market strategy, visit the PAL Robotics manufacturer page.
What the public profile tells you, and what still needs direct vendor confirmation
From a buying and rollout perspective, the REEM-C should be read as a research platform aimed at labs and development teams validating robotics workflows. ui44 currently tracks 11 capability signals, 6 sensor inputs, and a last verification date of 2026-05-25. That mix gives buyers a useful first-pass picture, but it is still only the public layer of due diligence, especially when procurement, uptime, and support commitments are decided directly with PAL Robotics.
Commercial model
Pricing not public
No public list price (contact sales). That usually means the final commercial package depends on deployment scope, services, or negotiated terms.
Integration posture
2 connectivity options
The profile lists Wi-Fi, Ethernet, plus ROS-based; real-time ros_control loop at 200 Hz; MoveIt! for motion planning; Whole-Body Control as the AI stack. That is enough to infer the basic network posture, but buyers should still confirm APIs, fleet management, and workflow integration details. ui44 currently tracks 5 declared compatibility links.
Spec disclosure
6/7 core specs public
ui44 currently has 6 of 7 core physical and operating specs filled in for this model, leaving 1 gap that matter for deployment planning. Missing runtime, charge, speed, or payload details can materially change staffing and site-readiness assumptions.
The current profile is detailed enough to support early comparison work, shortlist creation, and cross-checking against other research robots. It is still worth validating the final deployment package, because integration services, support coverage, software entitlements, and site-preparation requirements often sit outside the raw hardware spec sheet.
If you want a faster apples-to-apples read, compare the REEM-C against nearby alternatives in ui44's compare view, then cross-check the underlying AI, sensor, and subsystem terms in the components glossary. For manufacturer-level context, the PAL Robotics profile helps anchor this robot inside the wider product lineup.
Practical guide from day one through years of ownership
Research robot setup combines hardware assembly with software environment configuration. Unpack and assemble the platform following the manufacturer's documentation. Install the development framework — typically ROS or ROS 2 — and verify sensor connectivity. Calibrate all sensors using the manufacturer's tools and procedures. Set up the simulation environment (Gazebo, Isaac Sim, or equivalent) alongside the physical platform for parallel development. Establish version control for your experiment code and configuration. Document the initial calibration values and system state as your baseline for future reference. Plan network and computing infrastructure to handle the data rates your sensors will generate.
Research robots need maintenance that preserves the precision required for valid experimental results. Regularly verify sensor calibration — drift in camera intrinsics or IMU biases can invalidate experiment data. Maintain clean workspace conditions to protect optical sensors. Document any hardware modifications or maintenance performed, as these can affect experimental reproducibility. Update software dependencies carefully, documenting versions used for each experiment. Joint and actuator wear in research robots that perform repetitive tasks should be monitored and factored into experimental design.
Research robot software updates require careful management to maintain experiment reproducibility. Document the exact software versions used for each experiment. Test updates in a separate environment before applying to your experiment platform. Contribute bug fixes and improvements back to the community when using open-source frameworks. Be aware that ROS and other framework updates may require code changes in your custom packages — budget time for integration testing after major framework updates.
Research robots often have longer productive lives than commercial products because they can be upgraded and repurposed. Extend your investment by maintaining clean mechanical and electrical systems, documenting all modifications for future lab members, and keeping spare parts for common wear items. When specific components become obsolete, community forums and lab networks can be valuable sources for replacements. Consider the platform's modularity when planning future research directions — a platform that can accept new sensors and actuators adapts to evolving research questions.
For PAL Robotics-specific support resources and documentation, visit the PAL Robotics page on ui44 or check the manufacturer's official website at PAL Robotics's product page.
All REEM-C data on ui44 is verified against official PAL Robotics sources, including spec sheets, product pages, and press releases. Last verified: 2026-05-25. Official source: PAL Robotics product page. If you find outdated or incorrect information, please let us know — accuracy is our top priority.
See how the REEM-C stacks up — compare specs, browse the research category, or search the full database.