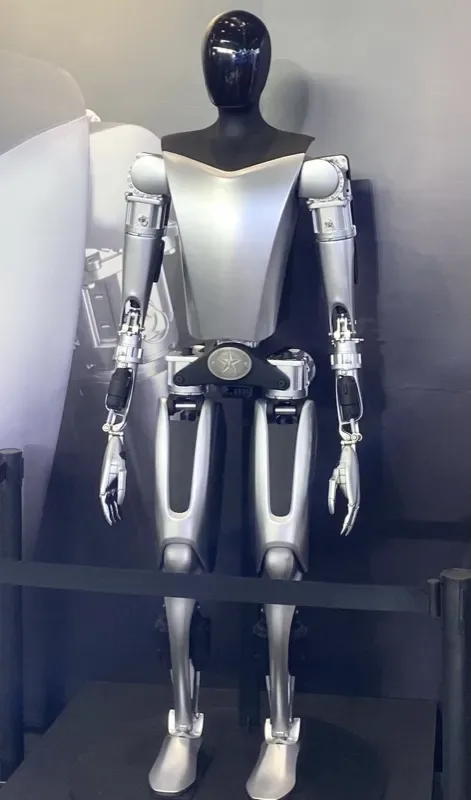
Optimus Gen 2
Tesla's second-generation humanoid robot. Currently in internal deployment at Tesla factories. No consumer sales or pre-orders available. Musk has stated a target price of ~$30,000.
Category
Description
Price
Estimated ~$30,000 (Musk's stated target)