Why it matters
What it tends to unlock
Higher-level planning, adaptation, and interaction quality, richer autonomy claims that can change the shortlist materially, and more flexible task handling when the vendor stack is mature enough.
LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools appears across 1 tracked robots, concentrated in Research. Use this page to understand why the signal matters, who relies on it most, and which live profiles deserve the first comparison click.
Tracked robots
1
Ready now
0
Manufacturers
1
Public prices
1
Why it matters
Higher-level planning, adaptation, and interaction quality, richer autonomy claims that can change the shortlist materially, and more flexible task handling when the vendor stack is mature enough.
What to verify
What runs on-device versus in the cloud, how branded AI labels map to real user-facing behavior, and whether updates and latency tradeoffs fit the intended job.
Coverage
The heaviest concentration is in Research (1). Top manufacturers include Hugging Face LeRobot (1).
Research brief
The useful questions here are how common LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools really is, which robot classes depend on it, and which live profiles are worth opening before you compare the whole stack.
Verified 30d
0
1 in the last 90 days
Top category
Research
1 tracked robots
Paired most often with
Bno055 Or Bno085 IMU, Dual Can Fd Motor Bus, and Joint/motor state feedback from RobStride actuators
Decision brief
Where it helps most
What to validate
Evidence basis
Source pack
Use the structure first: which categories lean on LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools, which manufacturers repeat it, and what usually ships beside it.
Lead category
1 tracked robots currently anchor this label.
Most repeated manufacturer
1 tracked robots make this the clearest manufacturer-level signal on the route.
Most common adjacent signal
1 shared robots pair this component with Bno055 Or Bno085 IMU.
| # | Name | Usage |
|---|---|---|
| 1 | Research | 1 robot |
| # | Name | Usage |
|---|---|---|
| 1 | Hugging Face LeRobot | 1 robot |
| # | Name | Shared robots |
|---|---|---|
| 1 | Bno055 Or Bno085 IMU | 1 robot |
| 2 | Dual Can Fd Motor Bus | 1 robot |
| 3 | Joint/motor state feedback from RobStride actuators | 1 robot |
| 4 | Usb Can Fd Adapter | 1 robot |
How to read the market
Category concentration tells you where the component is actually doing work, manufacturer repetition shows whether the signal is market-wide or vendor-specific, and pairings reveal which neighboring technologies usually ship alongside it.
The old card wall is replaced with a featured first-click strip and a dense inventory table so the route behaves like a serious directory.
Directory briefing
Open the clearest profiles first, then sweep the full inventory in a denser table. Featured cards are selected by readiness, image quality, and official source availability, so the first click is usually the most informative one.
Ready now
0
Public price
1
Official links
1
Featured now
1
How to scan this directory
Best first clicks
These robots score highest on readiness, public detail quality, and image clarity, making them the fastest way to understand how LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools shows up in practice.
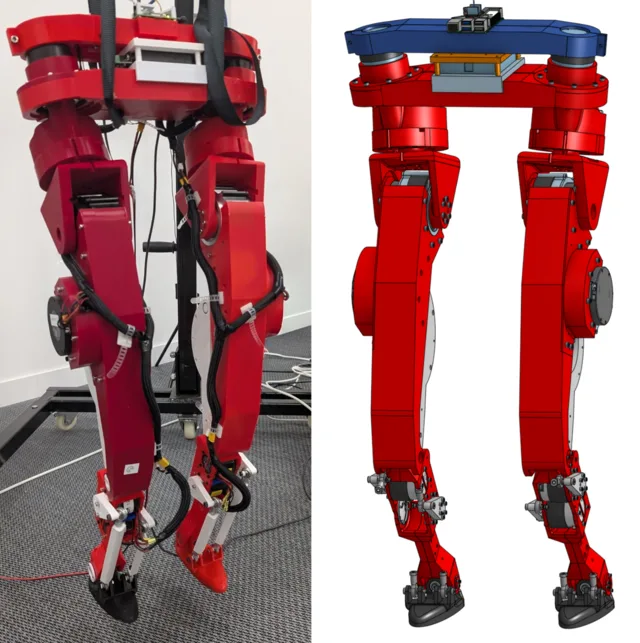
LeRobot Humanoid is an experimental open-source, low-cost bipedal humanoid project from the Hugging Face LeRobot ecosystem. The May 2026 release focuses on a reproducible lower-body biped platform rather than a finished consumer robot: it publishes 3D-printable hardware, a bill of materials, wiring and assembly documentation, runtime tools, simulation assets, identification workflows, and MJLab training environments. Official materials describe a 12-DOF no-arms biped controlled through Raspberry Pi 5, CAN FD motor control, IMU feedback, MuJoCo simulation, safety checks, and LeRobot integration for data collection and policy deployment. Upper-body integration and more advanced whole-body behaviors are on the roadmap, so builders should treat this as research hardware that requires careful commissioning, calibration, and safety procedures. Best treated as an exploratory lead until field readiness improves.
Compact mobile scan: status, price, standout context, and links stay visible without sideways scrolling.
Hugging Face LeRobot · Research
Price
$2,636
Standout
Official source linked
Sorted by readiness first so live, scannable profiles do not get buried under the long tail.
| Robot | Status | Price | Link |
|---|---|---|---|
LeRobot Humanoid Hugging Face LeRobot · Research |
Prototype | $2,636 | Official |
Quick answers
The short version of what this label means in the ui44 catalog, where it matters, and how to compare it without over-reading the marketing copy.
LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools currently appears on 1 tracked robots across 1 manufacturers. That makes this route useful for both deep research and fast shortlist scanning, not just one-off editorial reading.
The strongest concentration is in Research (1). Category mix is the fastest clue for whether this component behaves like baseline plumbing or a more selective differentiator.
0 of the 1 tracked profiles are currently marked Available or Active. That means the label has live market relevance here, but you should still open the profiles with public pricing or official links first before treating it as a clean buyer signal.
Start with readiness, official source quality, and the standout spec column in the inventory table. On component routes, those three signals usually remove weak profiles faster than reading every descriptive paragraph.
The strongest shared-stack signals here are Bno055 Or Bno085 IMU (1), Dual Can Fd Motor Bus (1), and Joint/motor state feedback from RobStride actuators (1). Use those pairings to branch into adjacent component pages when one label is too narrow for the decision.
1 matching robots currently expose public pricing. That is enough to create directional context, but not enough to treat one price bracket as the whole market. Use the directory to find the transparent profiles first, then widen the sweep.
Start with Hugging Face LeRobot (1). Repetition across manufacturers is often the clearest signal that the component is part of a stable market pattern rather than a one-off marketing callout.
The original long-form component research is still here, but collapsed so the main route can prioritize hierarchy and scan speed.
The baseline explanation of what LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools is, why it matters, and how to think about it before comparing implementations.
LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools is a ai component found in 1 robot tracked in the ui44 Home Robot Database. As a ai technology, LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools plays a specific role in enabling robot perception, interaction, or operation depending on its implementation in each platform.
Component Type
Used By
1 robot
Manufacturer
Category
Price Range
$2.6k
The AI platform is the cognitive engine of a robot. It encompasses the machine learning models, decision-making algorithms, and processing infrastructure that enable a robot to interpret sensor data, plan actions, and interact naturally with humans.
In the ui44 database, LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools is categorized under AI components. For a comprehensive explanation of all component types, consult the components glossary.
The AI platform fundamentally determines a robot's intelligence, adaptability, and user experience. The AI stack also affects responsiveness, privacy, and the robot's ability to receive meaningful software updates.
Advanced AI handles unexpected situations and improves over time
Enables natural language understanding for voice commands
On-device vs. cloud processing affects both privacy and capability
Used in 1 robot across 1 category — Research, indicating specialized use across the robotics industry.
Robot AI systems typically combine several layers that work together to transform raw data into intelligent behavior. Modern robots increasingly use neural networks with some processing on-device and some in the cloud.
Perception AI
Converts raw sensor data into understanding — recognizing objects, faces, and spaces
Planning AI
Decides what actions to take based on current understanding and goals
Control AI
Executes planned movements with precision, managing motors and actuators
Interaction AI
Understands and generates human communication — voice, gestures, text
LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools Integration
Implementation varies by robot platform and manufacturer. Each robot integrates LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools differently depending on system architecture, use case, and target tasks. Integration with other onboard AI subsystems and the main processing unit determines real-world performance.
Deeper technical framing, matched technology profiles, and the longer use-case treatment for LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools.
Beyond the high-level overview, understanding the technical foundations of ai technologies like LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools helps buyers and researchers evaluate implementations more critically.
Robot AI systems are built on layers of computational models, each handling different aspects of intelligence.
AI performance trade-offs — the accuracy-latency-energy triangle — fundamentally shape design decisions.
The AI landscape in robotics has undergone several paradigm shifts.
Classical robotics: hand-crafted rules and explicit programming
Machine learning era: data-driven approaches — learning from examples
Deep learning: end-to-end systems learning directly from raw sensor data
Foundation models & LLMs: broad world knowledge and natural language understanding
Current frontier: embodied AI — models that understand physics and spatial reasoning
Current robot AI has significant limitations that buyers should understand.
Key application domains for ai technologies like LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools.
AI enables robots to make decisions in real time without human input. Whether it's choosing the optimal cleaning path, deciding when to return to the charging dock, or determining how to respond to an unexpected obstacle, the AI platform processes sensor data and selects the best course of action from its learned repertoire.
Modern AI platforms, especially those leveraging large language models, allow robots to understand and respond to conversational commands. This goes beyond simple keyword recognition — advanced AI can handle ambiguous requests, follow multi-step instructions, and maintain context across a conversation.
Some AI platforms allow robots to improve their performance over time by learning from experience. A robot might learn the most efficient cleaning route for your specific home, adapt to your daily routines, or improve its object recognition based on items it encounters repeatedly.
AI can monitor the robot's own systems, predicting when components might fail or need maintenance. By analyzing patterns in motor performance, battery degradation, and sensor accuracy, AI-equipped robots can alert users to potential issues before they cause problems.
AI platforms enable sophisticated task planning — breaking complex goals into executable steps, scheduling activities around user preferences, and re-planning when circumstances change. This capability is essential for robots that handle multiple responsibilities or operate on complex schedules.
Visit each robot's detail page to see which capabilities are available on specific models.
Manufacturer mix, specs context, price context, category overlap, and adjacent components worth branching into next.
LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools spans 1 robot category — from consumer to research platforms.
Technologies most often paired with LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools across 1 robot.
Browse the full components directory or see the components glossary for detailed explanations of each technology.
1 of 1 robots with LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools have public pricing, ranging $2.6k – $2.6k.
Lowest
$2.6k
LeRobot Humanoid
Average
$2.6k
1 robot with pricing
Highest
$2.6k
LeRobot Humanoid
397 other ai technologies tracked in ui44, ranked by adoption.
2 robots
2 robots
1 robot
1 robot
1 robot
1 robot
1 robot
1 robot
Browse all AI components or use the robot comparison tool to evaluate how different ai configurations perform across specific robot models.
The AI landscape in robotics is undergoing a transformation driven by advances in large language models, multimodal AI, and embodied intelligence research.
Foundation models for robotics
Purpose-built models that understand physics, spatial reasoning, and manipulation — enabling generalization to new tasks
On-device vs. cloud debate
Privacy-conscious buyers prefer local processing; cloud-connected robots benefit from more powerful, frequently updated models
Open-source frameworks
ROS 2 and PyTorch for robotics are lowering barriers, enabling more manufacturers to develop capable AI platforms
Industry Adoption Snapshot
LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools is adopted by 1 robot from 1 manufacturer in the ui44 database, providing a data-driven view of real-world deployment patterns.
Platform compatibility, voice integration, and AI capabilities across robots with LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools.
The long-form buyer, maintenance, and troubleshooting material kept available without forcing it into the main scan path.
If LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools is an important factor in your robot selection, here are key considerations to guide your decision.
On-device vs. cloud
On-device AI works without internet but may be less powerful
Learning capability
Can the robot improve and adapt to your specific home over time?
Natural language
How well does it understand conversational voice commands?
Update frequency
Does the manufacturer regularly ship AI improvements?
Privacy
What data is sent to the cloud, and how is it protected?
Currently, none of the robots with LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools are listed as directly available for purchase. They are in prototype status. Monitor the individual robot pages for updates.
A component is only as good as its integration. Check how the manufacturer has incorporated LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools into the overall robot design and software stack.
Review what other ai technologies are paired with LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools in each robot — see the related components section.
Make sure the robot's category matches your use case. LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools serves different roles in different robot types.
Consider the manufacturer's reputation for software updates, support, and component reliability.
Compare Before You Buy
Use the ui44 comparison tool to evaluate robots with LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools side by side.
AI components present a unique maintenance profile because much of their capability is defined by software rather than hardware. This means AI performance can improve through updates but is also vulnerable to degradation if cloud services are discontinued or software support ends. Understanding the AI maintenance model is critical for assessing a robot's long-term value proposition.
The hardware that runs AI workloads — processors, memory, and neural network accelerators — is highly durable solid-state electronics. Physical failure of AI processing hardware is rare under normal operating conditions.
AI maintenance primarily involves keeping the robot's software stack updated. Firmware updates often include improved AI models, bug fixes for edge cases in perception or navigation, and new capabilities unlocked by algorithmic improvements.
AI future-proofing depends heavily on the manufacturer's ongoing investment in software development and the robot's computational headroom. Robots designed with more processing power than initially needed have room to run improved AI models in future updates.
For the 1 robot in the ui44 database using LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools, we recommend checking the individual robot pages for manufacturer-specific maintenance guidance and support documentation. Each manufacturer has different support policies, update frequencies, and warranty terms that affect the long-term ownership experience of their ai technologies.
AI-related issues in robots often manifest as degraded performance rather than complete failures. The robot may navigate less efficiently, misrecognize objects, respond slowly to commands, or make decisions that seem illogical. Diagnosing AI issues requires understanding whether the problem is in the AI software, the input data feeding the AI, or the processing hardware running the AI models.
Likely Causes
Resolution
Likely Causes
Resolution
Likely Causes
Resolution
For model-specific troubleshooting, visit the individual robot pages for the 1 robot using LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools. Each manufacturer provides model-specific support resources and diagnostic tools for their ai implementations.
What to do next
This page should hand you off to the next useful comparison step, not strand you at the bottom of a long detail route.
Widen the layer
Open the full ai workbench when LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools is only one part of the decision and you need the broader market map.
Side-by-side check
Move from label-level research into direct robot comparison once you know which profiles are documented well enough to trust.
Adjacent signal
This is the most common neighboring component on robots that already use LeRobot-compatible runtime, MuJoCo simulation controller, MJLab reinforcement-learning training environments, ONNX/Torch policy execution, and simulation-parameter identification tools, so it is the fastest next branch if you need stack context.