| Price | $20,000 USD | $24,950 USD | $3,999 USD | N/A |
|---|
| Height | 167cm | 141cm | 76–170cm (2'6"–5'7", adjustable) | 1300 mm (1.3 m) |
|---|
| Weight | 30kg | 24.5kg | Not disclosed | 34 kg |
|---|
| Battery Life | ~4 hours | 2–5 hours | Mains powered (600W, 120V)Not comparable for this robot | Not officially disclosed (46.8 V, 9000 mAh battery)Not safely comparable as a typed unit |
|---|
| Charging Time | Not disclosed | Not disclosed | N/A (plugged in)Not comparable for this robot | Not disclosed |
|---|
| Max Speed | Max run speed 6.2 m/s; walking speed 1.4 m/s | Not disclosed | StationaryNot comparable for this robot | Not disclosed |
|---|
| Degrees of Freedom | N/A | N/A | N/A | N/A |
|---|
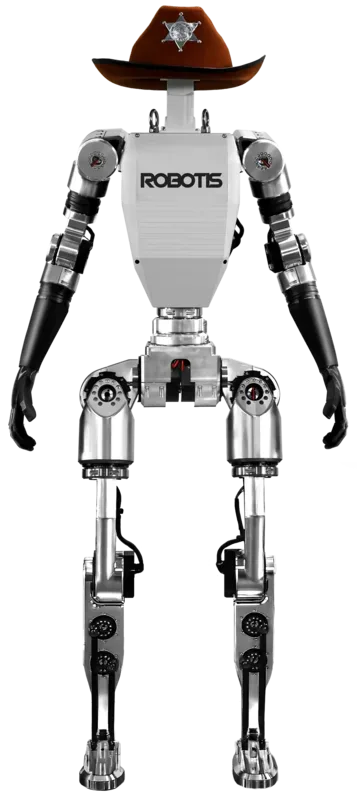
| AI | 1X Embodied Intelligence | Open-source autonomy stack (ROS 2 + Python SDK) | Weave AI (weekly model updates, learning from corrections) | 6 TOPS NPU (int4/int8/int16/FP16/BF16/TF32), Cortex-A76×4 + Cortex-A55×4 CPU, Mali-G610 GPU; NVIDIA Isaac Sim for RL training, imitation learning via leader-follower system |
|---|
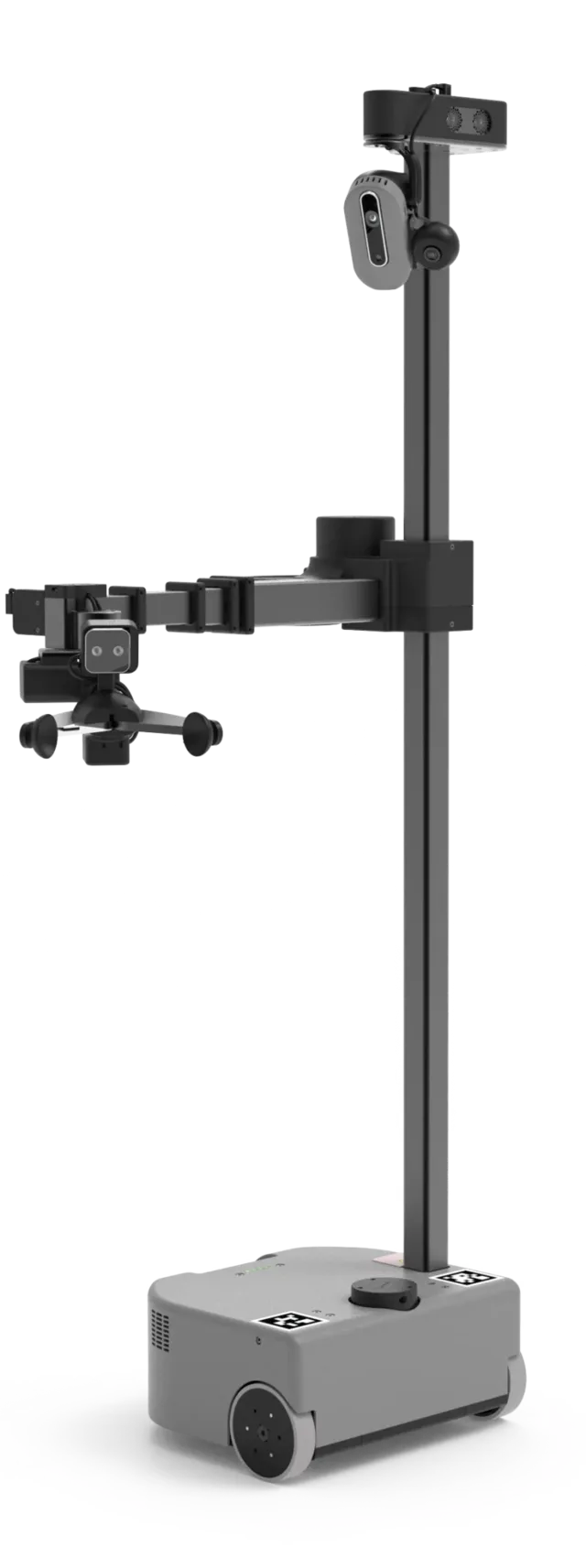
| Sensors | RGB Cameras, Depth Sensors, Tactile Skin, Microphone Array | Intel D405 RGBD Camera (gripper), Intel D435if RGBD Camera (head), Wide-Angle RGB Camera (head), Navigation Laser (LiDAR), Microphone Array, High Accuracy Base IMU, ArUco Fingertip Markers | Vision System, Proprioceptive Sensors | IMU (inferred from locomotion capability) |
|---|
| Connectivity | Wi-Fi, Bluetooth, 5G | Wi-Fi 6E, Bluetooth, Ethernet, USB | Wi-Fi 2.4GHz/5GHz, Ethernet | Wi-Fi 5, Bluetooth 5.0, Ethernet (2×), USB 2.0 (2× USB-A), USB 3.0 (1× USB-C, 1× USB-A) |
|---|
| Voice Assistants | None | None | None | None |
|---|
| Status | Pre-order | Active | Available | Development |
|---|
| Category | Humanoid | Home Assistants | Home Assistants | Research |
|---|
| Manufacturer | 1X Technologies | Hello Robot | Weave Robotics | ROBOTIS |
|---|