The TM Xplore I is a
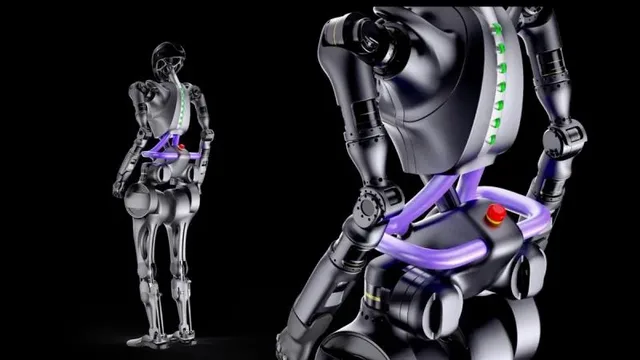
Humanoid robot made by
Techman Robot. Techman Robot's first humanoid robot platform, unveiled at NVIDIA GTC 2026 in March 2026. The TM Xplore I combines a humanoid upper body with a wheeled mobile base, designed for high-precision industrial automation tasks such as semiconductor manufacturing, electronics assembly, and automotive production. It is powered by the NVIDIA Jetson Thor module and uses a Vision-Language-Action (VLA) multimodal model for autonomous navigation, multimodal sensor fusion, and generative AI inference. The robot features over 22 articulated joints, integrated inspection cameras, and supports quick-change end-effectors. Techman Robot says it is backed by Quanta Group and supported by Quanta Storage Inc.; it plans to scale production in the second half of 2026 after internal factory testing. It features 3 sensor types, 1 connectivity protocols, and 5 distinct capabilities.