Humanoid·Interesting Engineering / Georgia Tech·1 min read
Georgia Tech's New Control System Makes Bipedal Robots 81% More Stable on Uneven Ground
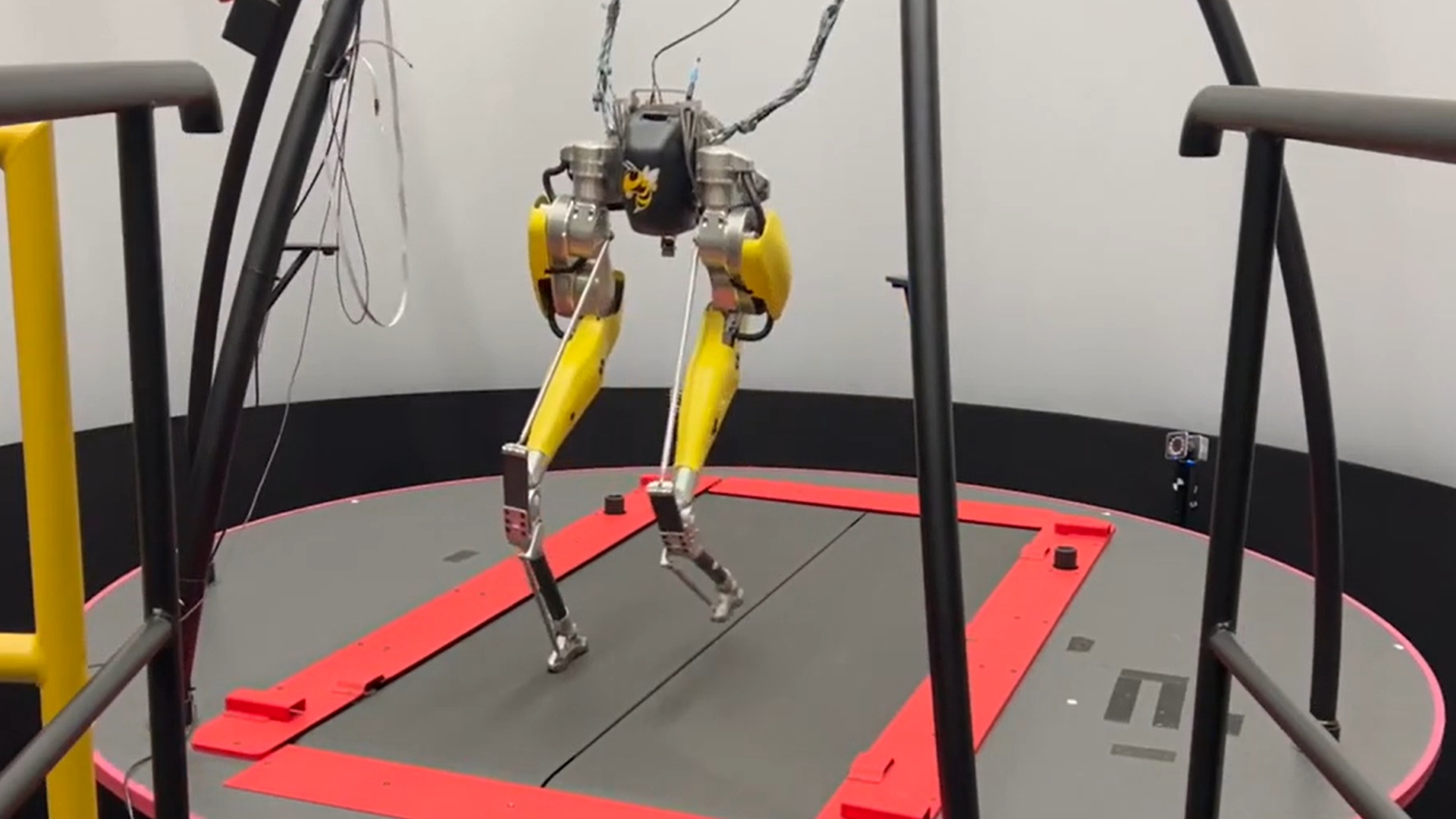
Researchers at Georgia Tech developed a real-time planning and control framework that improves how two-legged robots recover from sudden disturbances on uneven or moving terrain. Tested on the Cassie bipedal robot using a programmable treadmill that shifts direction unpredictably, the system achieved an 81% increase in recovery from instability compared to previous approaches. Instead of fixed movement patterns, the robot continuously evaluates whether its current plan will keep it upright and replans mid-stride if needed. The team sees the work as foundational for deploying humanoid robots in homes, factories, and logistics — environments where terrain is unpredictable and falls could be dangerous.
Georgia TechCassieBipedalStabilityResearchLocomotion